")
 Echo81")
 Echo81")

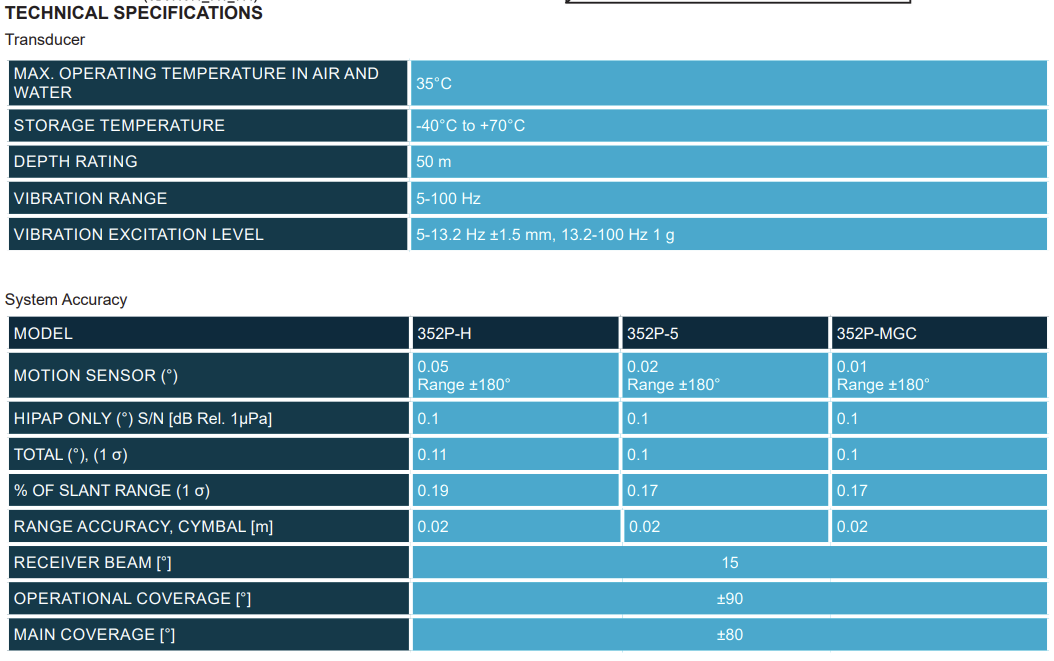
Kongsberg 352P MGC R3 USBL System (Rental)
Kongsberg 352P MGC R3 USBL System
Portable system designed for tracking ROV’s, towfish, divers and other subsea objects at several thousand meters range. The system operates in SSBL mode where it measures the distance and direction to subsea transponders and computes a 3D position in local coordinates or in geographical coordinates.
Built-in MGC RT inertial measurement unit for roll/pitch and heading compensation. No need for calibration to determine roll, pitch and heading alignments.
Product Description
Portable system designed for tracking ROV’s, towfish, divers and other subsea objects at several thousand meters range. The system operates in SSBL mode where it measures the distance and direction to subsea transponders and computes a 3D position in local coordinates or in geographical coordinates.
With its unique and compact transducer containing “a complete transceiver” and an accurate Motion Reference Unit, it will bring a new era into the underwater positioning services for “vessels of opportunity”. It is the only automatic beam steering portable transducer in the market. The transducer is designed to be mounted on a shaft to be installed over-the-side or through a moon-pool of a vessel.
Tiltable
The transducer can be tilted to have the 120 degree cone operating area in the sector of the required area. There will be no need for extra calibration, or mechanical fine adjustments, as the internal Motion Reference Unit will automatically compensate for the tilt.
Now also with built in Inertial sensor
A built in north seeking heading sensor is also available in the model HiPAP352P-I. The sensor is based on an inertial measurement unit and will allow for GPS antenna offset calibration only.
For more Kongsberg products click here
Factsheet: Kongsberg 352P USBL System
Manual: Kongsberg 352P USBL System
CONTACT INFO
Have a question? Can’t find what you’re looking for? We’d love to hear from you!
Connect with us using the information below.
PHONE
+1 706-522-3022
ADDRESS
481 S. Jackson Street
Hartwell, GA 30643
Hartwell, GA 30643
At ECHO81, we believe in the power of collaboration and are proud to work alongside a network of exceptional partners who share our commitment to excellence. We work with EdgeTech, Kongsberg, Applanix, AML Oceanographic, and many more.
We are always looking for new ways to grow and improve. If you have any questions, feedback, or would like to learn more about how ECHO81 can assist you, please don’t hesitate to Contact Us